世界は3次元です。この事実はあまりにも自明であるため、私たちのほとんどは、自分がどのように世界を認識しているのかについて疑問を抱くことはありません。しかし実際には、私たちのそれぞれの目は、まるでカメラのように、平面的な画像をとらえているに過ぎません。そして、その2つの平面的な画像から3次元の知覚を形成するという魔法のような現象が起こるのは、私たちの脳の中だけなのです。
今日、ジェスチャー操作の解釈、顔認識、あるいは車両の自動運転など、デジタルシステムに3次元世界との相互作用を求める場面がますます増えています。こうしたタスクを実現するためには、システムに、人間が持つ奥行きを認識する能力の少なくとも一部を付与する必要があります。
深度検知
デジタルイメージングにおける3D(深度)センシングには、三角測量と飛行時間法(ToF)という2つの基本的な手法があります。場合によっては、これらの手法を組み合わせることもあります。
三角測量は幾何学に基づいています。三角測量の一形態である「両眼視」は、人間の3D(立体)視覚の仕組みそのものです。人間の両眼は水平方向に離れて配置されています。つまり、それぞれの目がわずかに異なる角度から世界を見ていることになります。この視点の違いによって「視差」が生じます。視差とは、どちらの目で見ているかによって、背景に対する物体の位置がずれて見える現象のことです。 そして、私たちの脳はこの視差情報を利用して、視野内の物体の奥行き(距離)を感知し、世界に対する単一で統一された3D知覚を作り出します。
しかし、立体視は照明条件に左右されやすく、また明確な凹凸のある表面が必要となるため、確実に実現するのは困難です。その代わりに、コンピュータビジョンシステムでは、「構造化光」を利用した別の形式の三角測量法が用いられます。 これは、物体上にパターン(一連の線や多数の光点など)を投影し、わずかに異なる角度からそのパターンの歪みを分析する手法の、単に凝った呼び名に過ぎません。これは、真の両眼視を再現するよりもはるかに少ない処理能力で済み、コンピュータが深度情報を迅速に計算し、3Dシーンを再構築することを可能にします。

ある種の三角測量による深度測定では、構造化された光パターンを被写体に向けて投影し、撮像システムがこのパターンの歪みを解析することで、照明が当たっている領域の深度情報を導き出します。
三角測量法は、表面の高解像度マッピングに優れています。この手法は短距離での測定に最も適しているため、顔認識などの用途で非常に有用です。
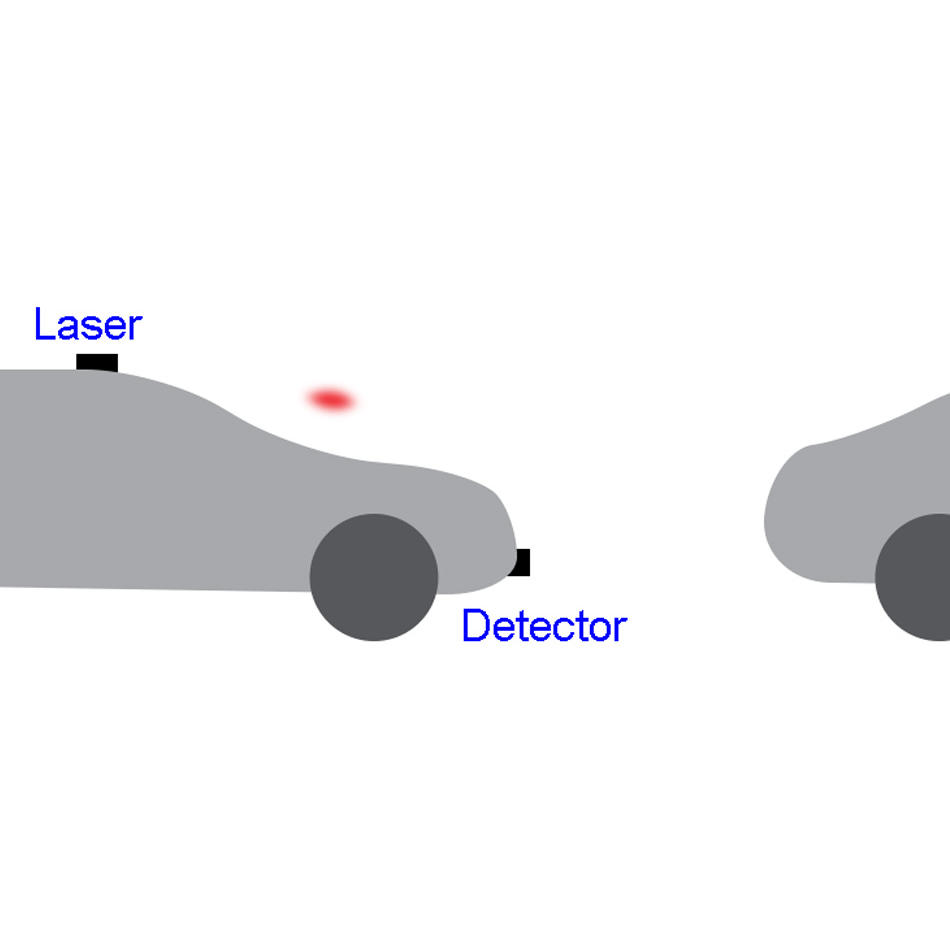
飛行時間法(ToF)には、主に2つの形式があります。 「ダイレクト・タイム・オブ・フライト」(dToF)では、シーンに光パルスを照射し、反射した光パルスが戻ってくるまでの時間を測定します。光速は既知であるため、この戻り時間を直接距離に変換することができます。この計算を画像内の各ピクセルに対して個別に実行することで、シーン内の各点における深度値を算出することができます。
ToFの2つ目の形式は「間接式飛行時間法」(iToF)です。ここでは、照明として連続的な変調信号が使用されます。システムは、反射光に含まれるこの変調の位相シフトを測定します。これにより、物体の距離を算出するためのデータが得られます。
ToF技術は、広範囲かつ長距離の測定を高速に行える点で優れています。そのため、VRヘッドセットでの室内スキャンや、ロボットのナビゲーションにおける障害物検知といった用途に最適です。

直接飛行時間測定法では、光パルスの往復時間を計測し、その時間間隔を距離に変換します。
3Dセンシング用光源の要件
光源の特性は、三角測量およびToF方式による3Dセンシングの両方において、その有効性と精度を左右する重要な要素です。各アプリケーションには固有の照明要件がありますが、一定の共通要件も存在します。
三角測量では、コヒーレント光源が有効です。これにより、生成可能なパターンの選択肢が広がります。また、より高解像度の構造化パターンを形成できるほか、長距離にわたってパターンの整合性を維持することも可能になります。
三角測量用光源には、安定したビーム指向特性も求められます。この特性に変動があると、深度測定の精度が低下する恐れがあります。
ToFシステムには、短く正確な光パルス(dToF)を放射できる光源、あるいは高周波で変調可能な連続光(iToF)を放射できる光源が必要です。立ち上がり・立ち下がり時間が短い精密 、正確な距離測定において極めて重要です。
ToFシステム、特に広範囲や長距離をカバーするためにフラッド照明を使用するシステムは、一般的に三角測量システムよりも高い出力が必要とされます。これにより、反射光が検出可能な十分な強度を確保できるほか、周囲の光が強い環境下でもシステムが正常に機能するようになります。
出力電力が向上するにつれ、電力効率(光出力電力と入力電力との比率)の重要性は高まります。特に、携帯型(バッテリー駆動)のデバイスにおいては、効率性が極めて重要となります。
より精度の高い深度測定を実現するレーザー
半導体レーザ 三角測量や飛行時間(TOF)センシングのいずれにおいても、他のどの光源よりもこれらの要件に適合しています。発光ダイオード(LED)半導体レーザ 、入手が容易で比較的低コストであるため、これまで一部の3Dセンシング用途で採用されてきました。しかし、3Dセンシングシステムの性能や効率に対する要求が高まるにつれ、LEDではもはや十分な性能を発揮できなくなっています。
その理由の一つは、半導体レーザ 狭い発光スペクトル、コヒーレンス、および高輝度という特性を兼ね備えている点にある。これらの特性が相まって、半導体レーザーは、高精度で高コントラスト、かつ安定した構造化光パターンの生成に最適である。
また、レーザーのスペクトル出力が狭いため、検出システムにおいて周囲の光を容易に除去することができます。これにより、明るい日差しの下やその他の明るい環境においても、あらゆる種類のセンシングシステムの性能が向上します。
半導体レーザ の高い輝度は、反射信号の強度をさらに高めます。特にTOF(飛行時間法)の用途においては、これによりシャッター時間が短縮され、フレームレートが向上し、反射率の低い物体の検知能力が高まり、また、明るい環境下での性能も向上します。一方、輝度が低いLEDでは、同等の詳細度や深度分解能を実現するのは困難です。
さらに、半導体レーザ 、消費電力やサイズという点でLEDに比べて大きな利点を持っています。小型の筐体から強力な光を出力できるため、コンパクトな電池駆動の機器に最適です。
最後に、半導体レーザ LEDよりもはるかに高速な速度でスイッチングや変調を行うことができます。この高速な変調により、精度を向上させることができる高度なToF技術が可能になります。
Coherent 、3Dセンシング分野でCoherent
Coherent 、3Dセンシング用照明光源の世界的リーダーCoherent 、これまでに20億台以上を出荷してきました!当社の製品ラインナップには、レーザー、光学部品、および完全な照明モジュールが含まれています。
当社の製品ラインナップには、垂直共振器面発光レーザー(VCSEL)、VCSELアレイ、およびエッジ発光半導体レーザ (EEL)が含まれます。
特に、通常940 nmで発光するVCSELアレイは、今日の3Dセンシングにおいて主流の光源となっています。これにはいくつかの理由があります。その一つは、VCSELでは光がデバイスの側面からではなく、上面から放出される点です。これにより、他の部品とともに回路基板上に容易に実装することが可能になります。 また、3Dセンシングで使用される出力レベルにおいて、VCSELはEELよりも低コストです。その結果、EELは通常、高性能なVCSELがまだ利用できない長波長域(1200 nm以上)でのみ採用されています。 これらの長波長が持つ主な利点は、明るい日光下でも安定した性能を発揮すること(日光を事実上すべて遮断できる)と、眼への安全性が向上すること(近赤外波長と比較して10倍の高い出力レベルが可能)です。
Coherent 、6インチGaAsウェハーをベースとしたVCSELおよびEELの製造において、成熟したプラットフォームCoherent 。これにより、当社は同技術分野における量産リーダーとしての地位を確立し、卓越した信頼性と性能を備えたデバイスを安定して提供しています。
3Dセンシング用の光源は、通常、広角照明またはパターンプロジェクターのいずれかの構成をとります。広角照明は、特定の角度範囲にわたって均一な照明を提供します。これらは、視野全体にわたる均一な光分布が測定精度の鍵となる、顔認識やジェスチャー検出などの用途で使用されます。
パターンプロジェクタは、実際には三角測量システムとToFシステムの両方で使用されています。光パターンとToF測定を組み合わせることで、信号対雑音比が向上し、マルチパスによる測定誤差が低減されます。これは、光がセンサーに到達する前に複数の表面で反射することで生じる誤差です。
いずれの場合も、用途の厳密な要件レーザ出力 、光学系を用いてレーザ出力 整形・変換します。広角照明装置の製作には、通常、比較的単純で低コストな成形プラスチックレンズを使用すれば十分です。しかし、構造化光源に対する要求はより厳しいものとなります。
Coherent 、回折光学素子(DOE) およびメタ光学技術を用いて、構造化光照明のニーズCoherent 。メタ光学技術では、波長 よりも小さい物理的構造であるナノ構造を利用し、光の伝搬特性を変化させます。これには、ビーム形状、発散角、強度分布の変更に加え、ビームを分割して構造化光パターンを生成することも含まれます。
Coherent 大きな利点は、ビームのコリメーションや分光といった複数の光学機能を、単一のコンパクトな素子に統合できる点にあります。これにより、光学システムのサイズと複雑さが軽減されるだけでなく、3Dセンシングモジュールの全体的な性能も向上します。
Coherent もう一つの大きな強みはCoherent 照明モジュールソリューション全体を設計し、垂直統合できるCoherent 。この統合により、光源、光学系、ドライバIC、パッケージングがすべてシームレスに連携するよう最適化され、最も過酷な用途でも大量導入が可能な、信頼性が高く高性能でありながらコストパフォーマンスに優れた製品をお客様に提供しています。

Coherent 、広角照明モジュールおよびドット投影モジュールをCoherent 。
例えば、当社の3Dセンシング用照明モジュールは、電子的寄生成分(不要な静電容量、インダクタンス、または抵抗)を最小限に抑えるよう設計されています。これは、高精度ToFセンサーの性能に不可欠なナノ秒単位のパルス幅と、サブナノ秒単位の立ち上がり/立ち下がり時間を実現するために不可欠です。 さらに、当社は目の安全性を重視しており、デバイスの健全性や出力電力を監視する機能を組み込むことで、あらゆる状況下において光出力が常に定められた安全基準内に収まるよう確保しています。これは民生用デバイスにとって不可欠な要件です。
これらすべてを総合すると、Coherent 単なる優れたコンポーネントにとどまりません。3Dセンシング技術の複雑な仕組みを深く理解し、デバイスの性能を向上させ、ユーザーの安全を確保する、包括的で統合されたソリューションをお届けできるチームが、皆様をサポートいたします。当社とパートナーシップを結ぶことで、長年にわたる卓越した実績と、光技術の革新に向けた継続的な開発に、ぜひご期待ください。
3Dセンシング向けCoherent について詳しくはこちら。